In July 2020, China's Tianwen-1 mission arrived in orbit around Mars, consisting of six robotic elements: an orbiter, a lander, two deployable cameras, a remote camera, and the Zhurong rover.
As the first in a series of interplanetary missions by the China National Space Administration (CNSA), the mission's purpose is to investigate Mars's geology and internal structure, characterize its atmosphere, and search for indications of water on Mars.
Like the many orbiters, landers, and rovers currently exploring Mars, Tianwen-1 is also searching for possible evidence of life on Mars (past and present).
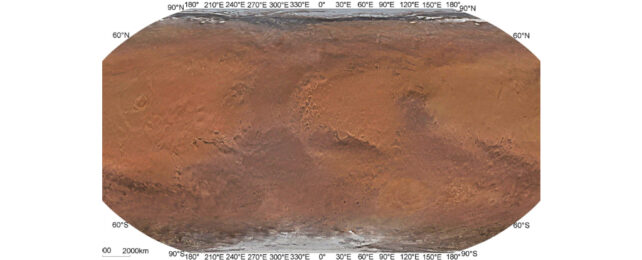
In the almost 1298 days that the Tianwen-1 mission has explored Mars, its orbiter has acquired countless remote-sensing images of the Martian surface. Thanks to a team of researchers from the Chinese Academy of Sciences (CAS), these images have been combined to create the first high-resolution global color-image map of Mars with spatial resolutions greater than 1 km (0.62 mi). This is currently the highest-resolution map of Mars and could serve as a global base map that will support crewed missions someday.
The team was led by Professor Li Chunlai from the National Astronomical Observatories of China (NOAC) and Professor Zhang Rongqiao from the Lunar Exploration and Space Engineering Center. They were joined by multiple colleagues from the Key Laboratory of Lunar and Deep Space Exploration, the Institute of Optics and Electronics, the University of Chinese Academy of Sciences, and the Shanghai Institute of Technical Physics. The paper detailing their research, "A 76-m per pixel global color image dataset and map of Mars by Tianwen-1," recently appeared in the journal Science Bulletin.
Several global maps of Mars have been created using remote-sensing images acquired by instruments aboard six previous missions. These include the visual imaging systems of the Mariner 9 probe, the Viking 1 and 2 orbiters, the Mars Orbiter Camera-Wide Angle (MOC-WA) aboard the Mars Global Surveyor (MGS), the Context Camera (CTX) aboard the Mars Reconnaissance Orbiter (MRO), the High-Resolution Stereo Camera (HRSC) of Mars Express (MEX), and the Thermal Emission Imaging System (THEMIS) on the Mars Odyssey orbiter.
However, these maps all had a spatial resolution significantly less than what the CAS team created using images acquired by the Tianwen-1 orbiter. For example, the MGS MOC-WA Atlas Mosaic has a spatial resolution of 232 meters per pixel (280 yards per pixel) in the visible band, and the THEMIS Global Mosaic of the Mars Odyssey mission offers a spatial resolution of approximately 100 m/pixel (~110 ft/pixel) in the infrared band. While the MRO Global CTX Mosaic of Mars covered 99.5% of the Martian surface (88° north to 88° south) in the visible band, it has a spatial resolution of about 5 m/pixel (5.5 yards/pixel).
There has also been a lack of global color images of Mars with spatial resolutions of a hundred meters (110 yards) or higher. In terms of global color images, the Mars Viking Colorized Global Mosaic v1 and v2 have spatial resolutions of approximately 925 m/pixel and 232 m/pixel (~1010 and 255 yards/pixel), respectively.
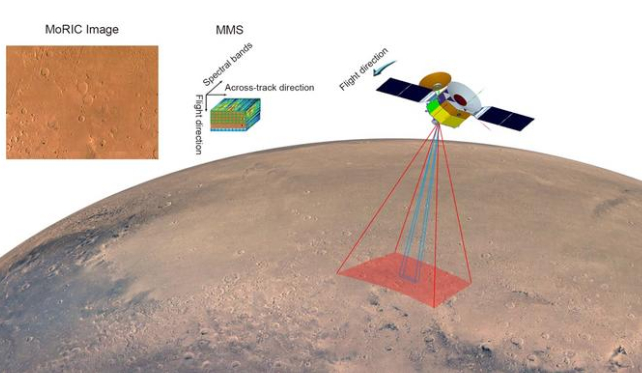
Meanwhile, the MoRIC instrument acquired 14,757 images during the more than 284 orbits executed by the Tianwen-1 orbiter, with spatial resolutions between 57 and 197 m (62 and 215 yards).
During this same time, Tianwen-1's Mars Mineralogical Spectrometer acquired a total of 325 strips of data in the visible and near-infrared bands, with spatial resolutions varying from 265 to 800 m (290 to 875 yards).
The collected images also achieved global coverage of the Martian surface. Using this data, Professor Li Chunlai, Professor Zhang Rongqiao, and their colleagues processed the image data that led to this latest global map of Mars. The team also optimized the original orbit measurement data using bundle adjustment technology.
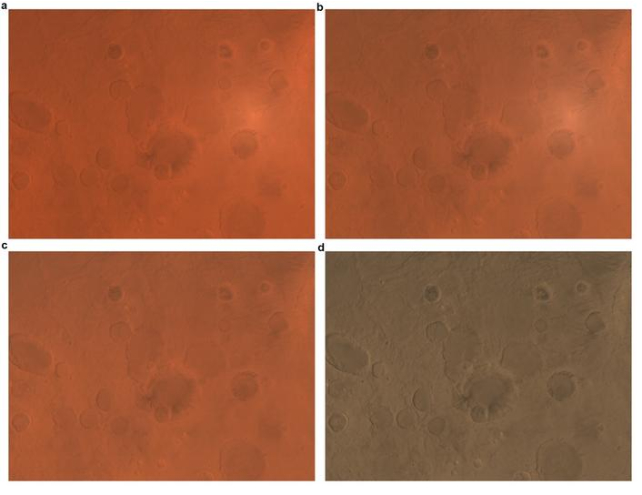
By treating Mars as a unified adjustment network, the team was able to reduce the position deviation between individual images to less than one pixel and create a 'seamless' global mosaic.
The true colors of the Martian surface were achieved thanks to data acquired by the MMS, while color correction allowed for global color uniformity. This all culminated with the release of the Tianwen-1 Mars Global Color Orthomosaic 76 m v1, which has a spatial resolution of 76 m (83 yards) and a horizontal accuracy of 68 m (74 yards).
This map is currently the highest-resolution true-color global map of Mars and significantly improves the resolution and color authenticity of previous Mars maps.
This map could serve as a geographic reference for other space agencies and partner organizations to map the Martian surface with even greater resolution and detail. It could also be used by space agencies to select sites for future robotic explorers that will continue searching for clues about Mars' past.
It could also come in handy when NASA and China send crewed missions to Mars, which are slated to commence by the early 2030s or 2040s.
This article was originally published by Universe Today. Read the original article.